Analog Devices (ADI) is a global leader in precision sensing, mixed-signal design, and edge computing, technologies that sit at the intersection of the physical and digital worlds. In robotics, ADI's work focuses on Physical Intelligence: the ability of a system to perceive, reason, and act locally, grounded in the realities of the physical environment. For dexterous robotic manipulation, the gap between simulation and the physical world remains one of the field's hardest unsolved problems.
Teaching a robot hand to handle objects with the nuance and adaptability of a human requires not just sophisticated hardware, but training data that is both rich in physical realism and grounded in genuine human expertise. ADI, whose work in precision sensing and physical-edge intelligence underpins a growing range of robotics applications, collaborated with MANUS to address this challenge head-on.
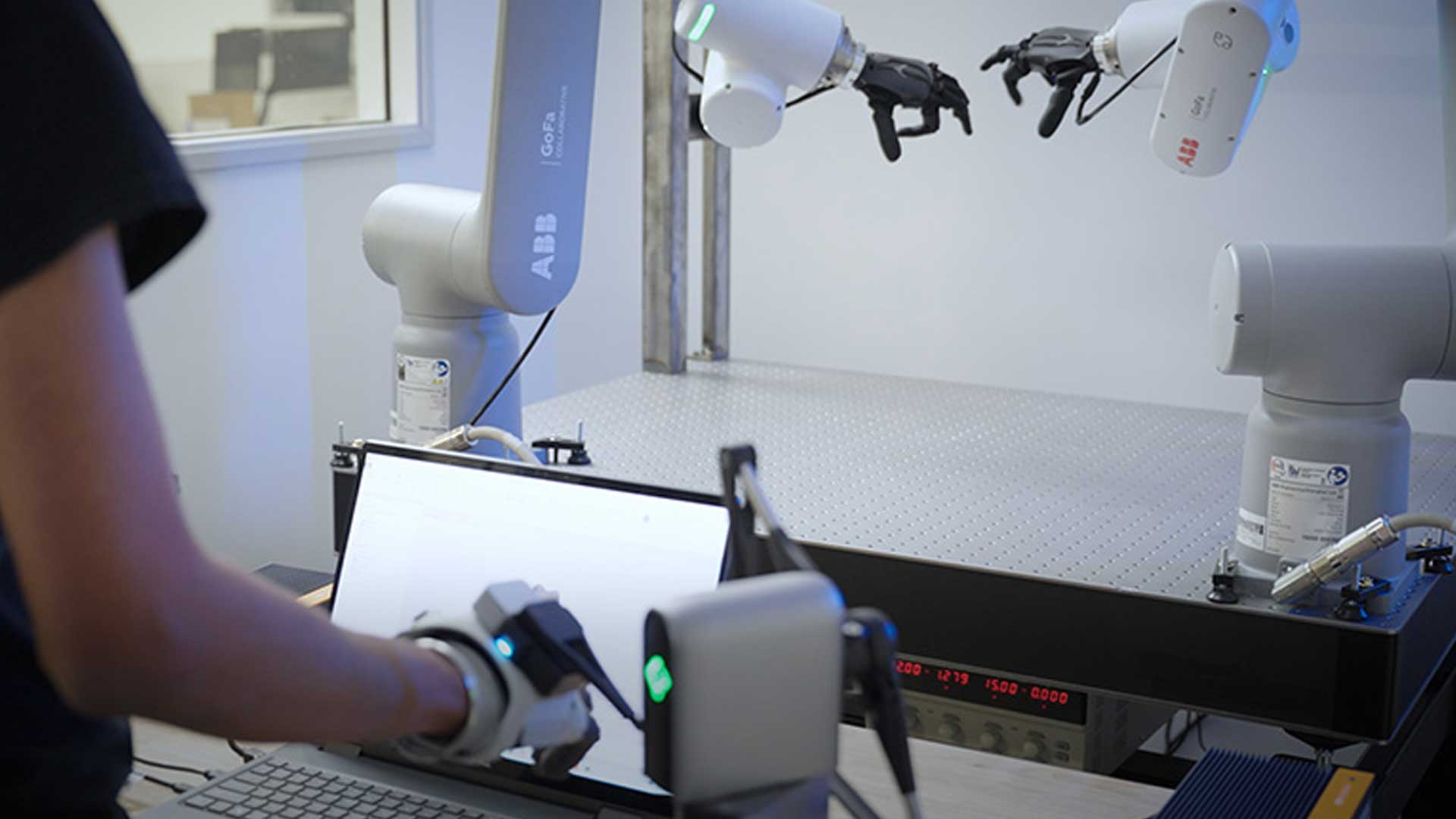
In this pipeline, MANUS gloves serve as the human motion capture interface, translating the operator's hand kinematics into control inputs for the simulated robotic hand in real time. As the operator moves, the IPC physics engine runs in parallel, generating real-time tactile sensor data and deformable contact feedback synchronized to those motions. The result is a paired dataset combining human motion capture with physically grounded tactile simulation: two data streams that would otherwise be difficult to obtain simultaneously at this level of fidelity.
The core insight driving this work is that sim-to-real transfer fails when simulation lacks physical credibility. By pairing human motion data with contact feedback generated by the physics engine, the dataset captures the force-contact relationships a real robotic hand will encounter in deployment. This positions the joint MANUS-ADI approach as a principled attempt to reduce the distribution gap between simulation and reality, making learned manipulation policies more likely to transfer reliably to physical hardware.