Training dexterous manipulation policies requires large volumes of human demonstration data that accurately represent the full kinematic range of the hand. The hand operates in highly self-occluding configurations, and the tasks most relevant to manipulation are precisely the ones where vision-based tracking tends to fail. For teams building generalizable manipulation models, the quality constraint begins at the capture layer. Inconsistent or incomplete hand pose data limits what any downstream architecture can learn, regardless of model complexity.
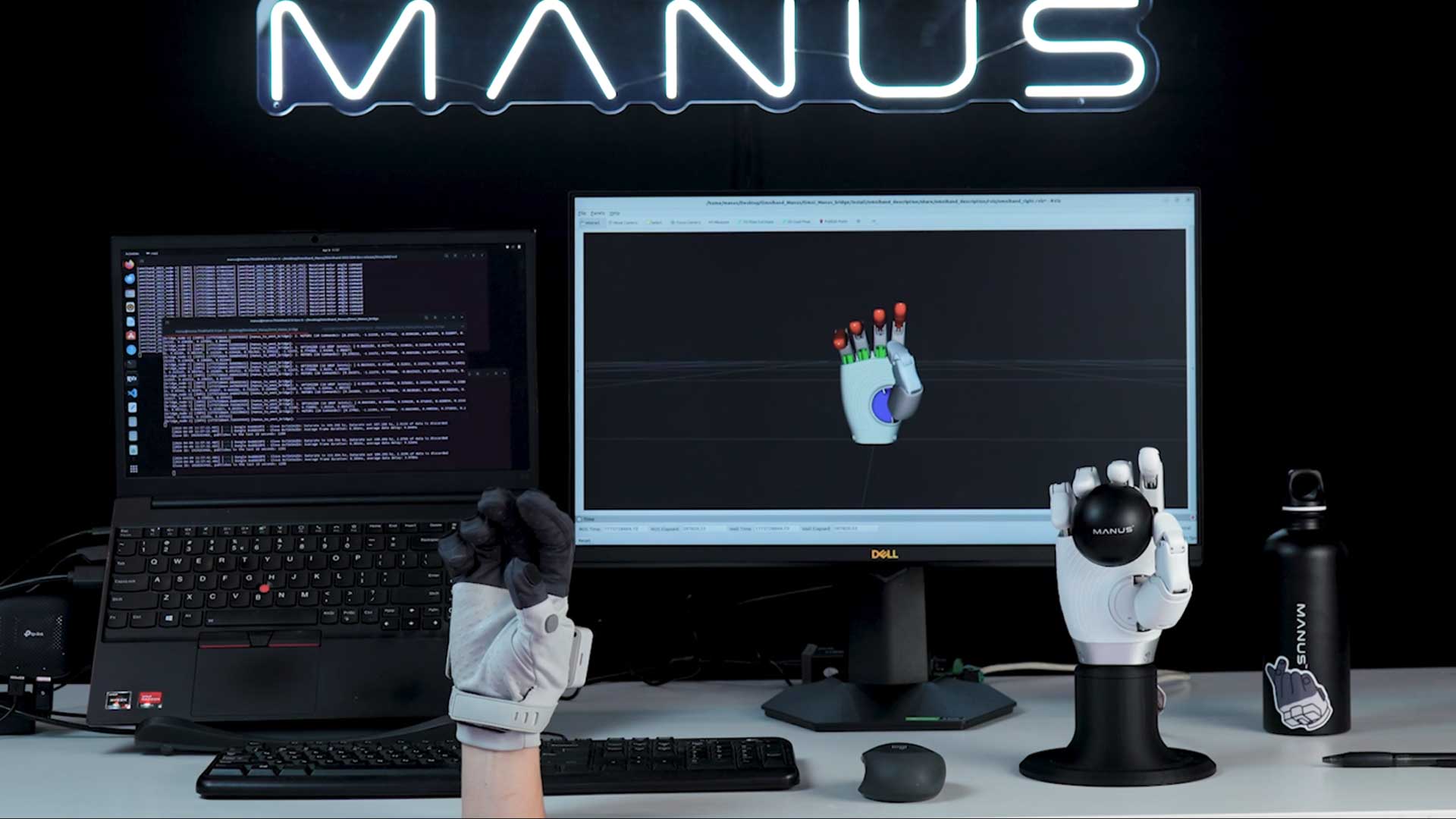
Mimic Robotics integrates MANUS data gloves as the primary wearable input for human hand demonstration collection. The gloves record continuous, high-resolution finger data across the hand, producing a clean kinematic stream that is not subject to line-of-sight constraints or environmental lighting conditions.
MANUS gloves maintain tracking accuracy over time without drift accumulation, which matters for collection workflows that span multiple operators, sessions, and environments. Each demonstration yields consistent pose data from start to finish.
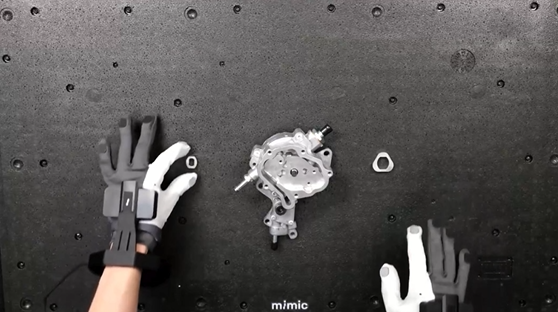
The combination of high precision, occlusion-free, drift-free tracking, and minimal setup allows Mimic Robotics to scale their data collection pipeline quickly as new customer use cases are introduced. The wearable approach removes bottlenecks that would otherwise arise from fixed capture infrastructure, enabling the team to treat the human hand as a portable, high-fidelity data source that can be deployed wherever demonstrations are needed.
As the robotics field moves toward generalizable manipulation policies trained on large and diverse demonstration datasets, the integrity of the capture layer becomes a fundamental constraint on model performance. Wearable glove-based sensing addresses the structural limitations of camera-dependent approaches at the source, producing kinematic data that is consistent, scalable, and deployable outside controlled lab environments. For teams building physical AI systems that must operate reliably in real-world conditions, the quality of hand pose data collected during human demonstration directly shapes the ceiling of what downstream policies can learn.