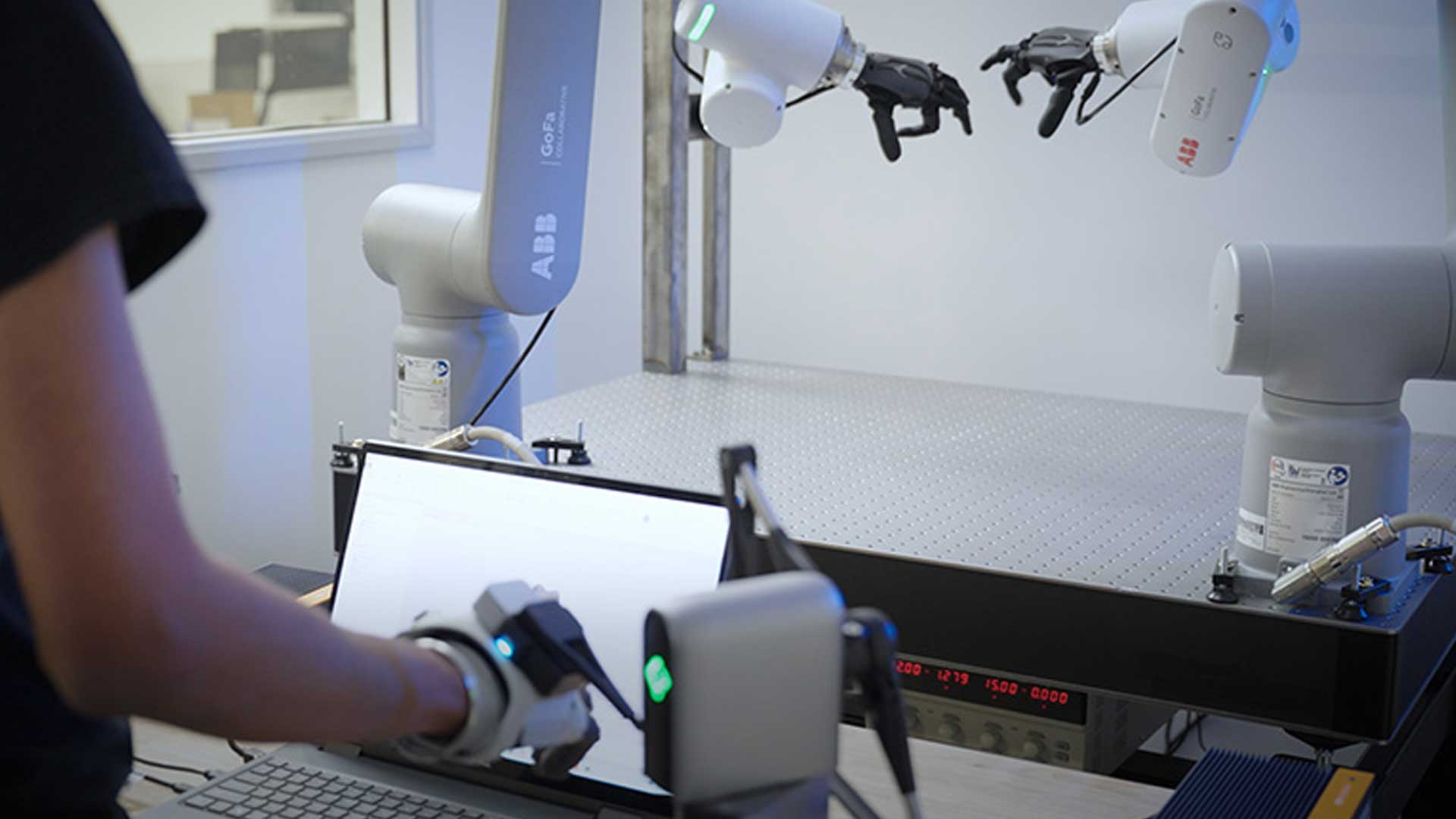
Westlake Robotics has demonstrated full-body humanoid robot teleoperation powered by its GAE (General Action Expert) embodiment AI system, with MANUS gloves serving as a key part of the operator input setup.
The Westlake Robotics Titan o1 humanoid robot is powered by the newly developed GAE embodiment system, a motion generalization foundation model pretrained on large-scale human movement data. GAE unifies whole-body coordination under a single model, generating coherent full-body motion from operator inputs. Acting as the robot's general-purpose cerebellum, GAE enables Titan o1 to instantly execute the most appropriate actions upon receiving a signal, even movements it has never performed before. Its cross-embodiment capability means the same foundation model can be deployed across robots of different structures and sizes, making it a versatile and scalable solution for humanoid robotics.
In this system, MANUS gloves deliver precise hand data that GAE depends on, contributing to the accuracy of the system's motion inference.
Unlike optical tracking and IMU-based systems, MANUS gloves capture every finger movement regardless of hand pose or object interaction, maintaining positional accuracy across long sessions without recalibration. The 25 DOF output delivers the manipulation detail required to precisely replicate pinch, grasp, and tool-handling postures, giving GAE a ground-truth signal rather than noisy input requiring correction.
By combining GAE with MANUS gloves, Westlake Robotics has demonstrated full-body humanoid teleoperation with a minimal, wearable input configuration. The system achieves low-latency synchronization between operator motion and robot behavior. Because GAE is designed for cross-embodiment deployment, MANUS gloves serve as a consistent hand input layer that extends this teleoperation approach beyond the Titan o1 to different humanoid platforms.