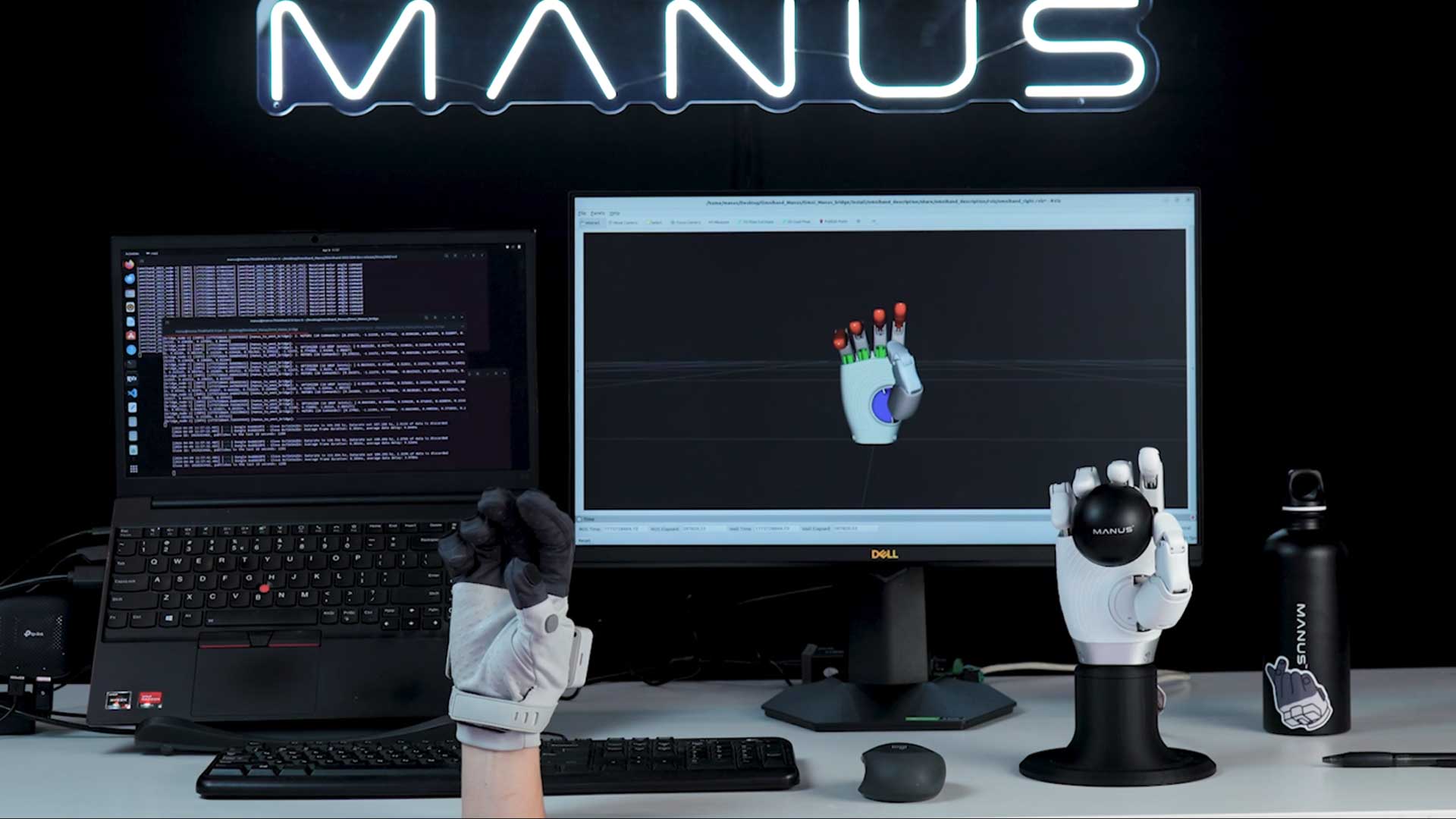
Xynova showcased the teleoperation of its Flex 2 dexterous hand using MANUS Metagloves Pro Haptic. The setup captures human hand motion in real time and transfers it to the robotic platform through a control pipeline driven by continuous finger articulation data.
MANUS Metagloves Pro Haptic capture detailed finger articulation with low latency, feeding the continuous motion stream that teleoperation pipelines depend on. Multiple hand data representations — including ergonomics data, raw sensor data, and skeletal hand data — allow teams to select the format that fits their control framework and kinematic model.
In the Flex 2 demo, Xynova maps four fingers using MANUS ergonomics data and controls the thumb through endpoint position, accommodating the kinematic differences between the human hand and the robotic hand. The operator's movements translate into robot actions while preserving the intent behind each gesture.
The Xynova Flex 2 is a 23-degree-of-freedom dexterous hand built for humanoid robotics and embodied intelligence research. Translating human intent into useful motion across that many degrees of freedom places significant demands on the operator interface: finger tracking needs to be accurate, latency needs to be low, and the data representation needs to fit the robot's kinematic model without requiring extensive post-processing.
Xynova's setup used the MANUS Metagloves Pro Haptic as the motion input for a teleoperation workflow supporting imitation learning, data collection, and real-world manipulation tasks.