At ICRA 2026, Shadow Robot demonstrated the teleoperation of both its five-finger Shadow Hand and three-finger Shadow DEX-EE Chiral robotic hands using MANUS gloves. The Shadow Hand is an anthropomorphic robotic hand with 20 degrees of freedom, while the DEX-EE Chiral features a three-finger design with a human-like thumb offset optimized for teleoperation and imitation learning.
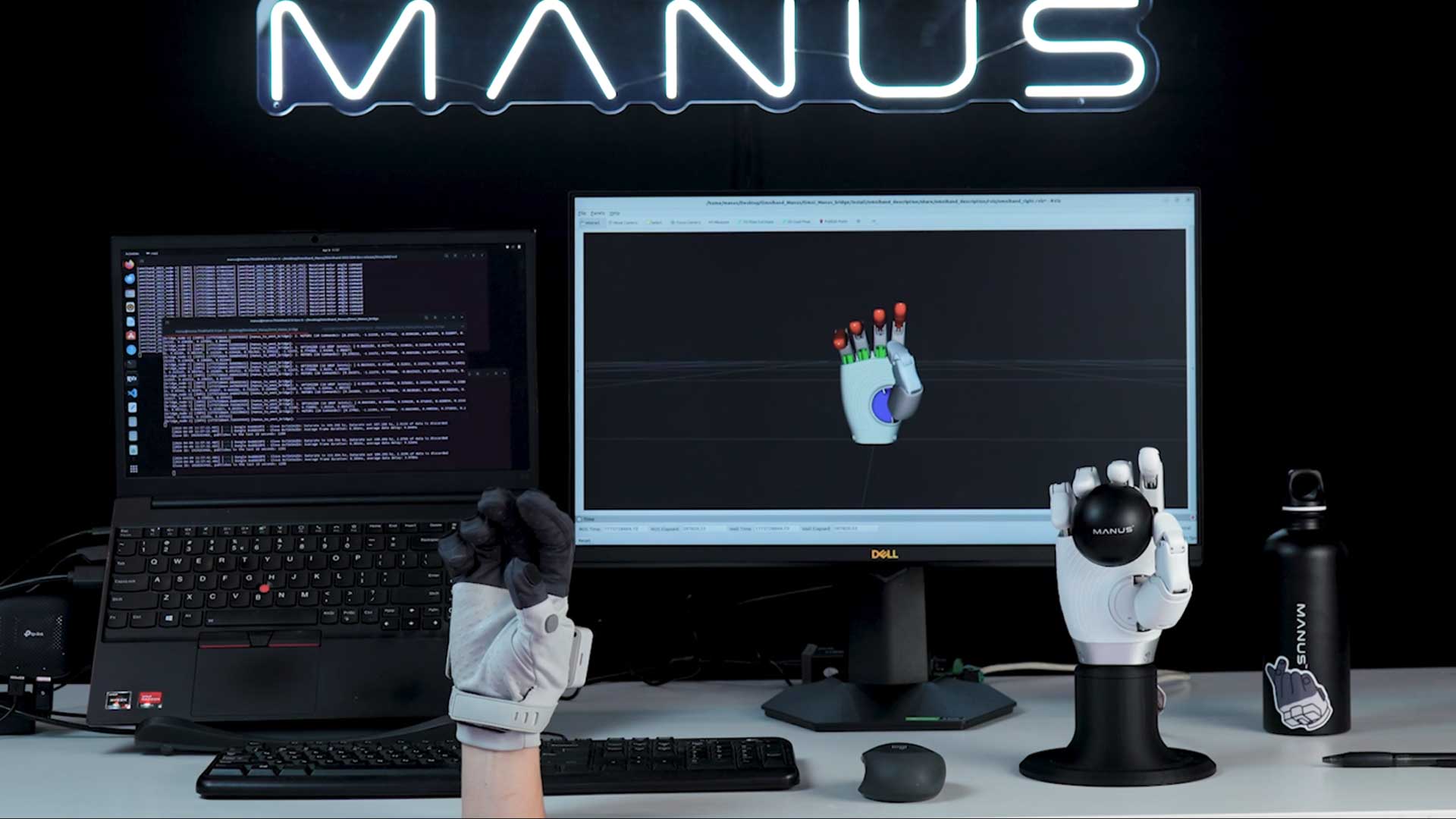
MANUS gloves provide multiple hand data representations through the SDK, including ergonomics data, raw sensor output, and skeletal hand models. For this demonstration, Shadow Robot used the MANUS skeletal hand models to map joint transforms directly to the robotic hands. Offsets and scaling were calibrated to account for differences between human and robotic hand dimensions, enabling natural and accurate motion transfer.
For the Shadow Hand, finger movements can be mapped directly from the human hand. For the three-finger DEX-EE Chiral, Shadow Robot implemented a dynamic control strategy that adapts to the operator's hand posture. The robotic thumb remains directly mapped to the human thumb, while the other two robotic fingers dynamically shift between grouped-finger control during open-hand movements and direct index- and middle-finger control during pinch grasps.
Human and robotic hands often differ in structure, degrees of freedom, and kinematics, which means transferring human motion to a robot platform is not always a matter of reproducing joint angles directly. In this demonstration, fingertip positions provided a practical control interface that allowed the robot hand to reproduce the intended manipulation despite the difference in mechanical design. This kind of task-oriented mapping is relevant to robot learning, dataset generation, and cross-embodiment transfer in embodied AI.