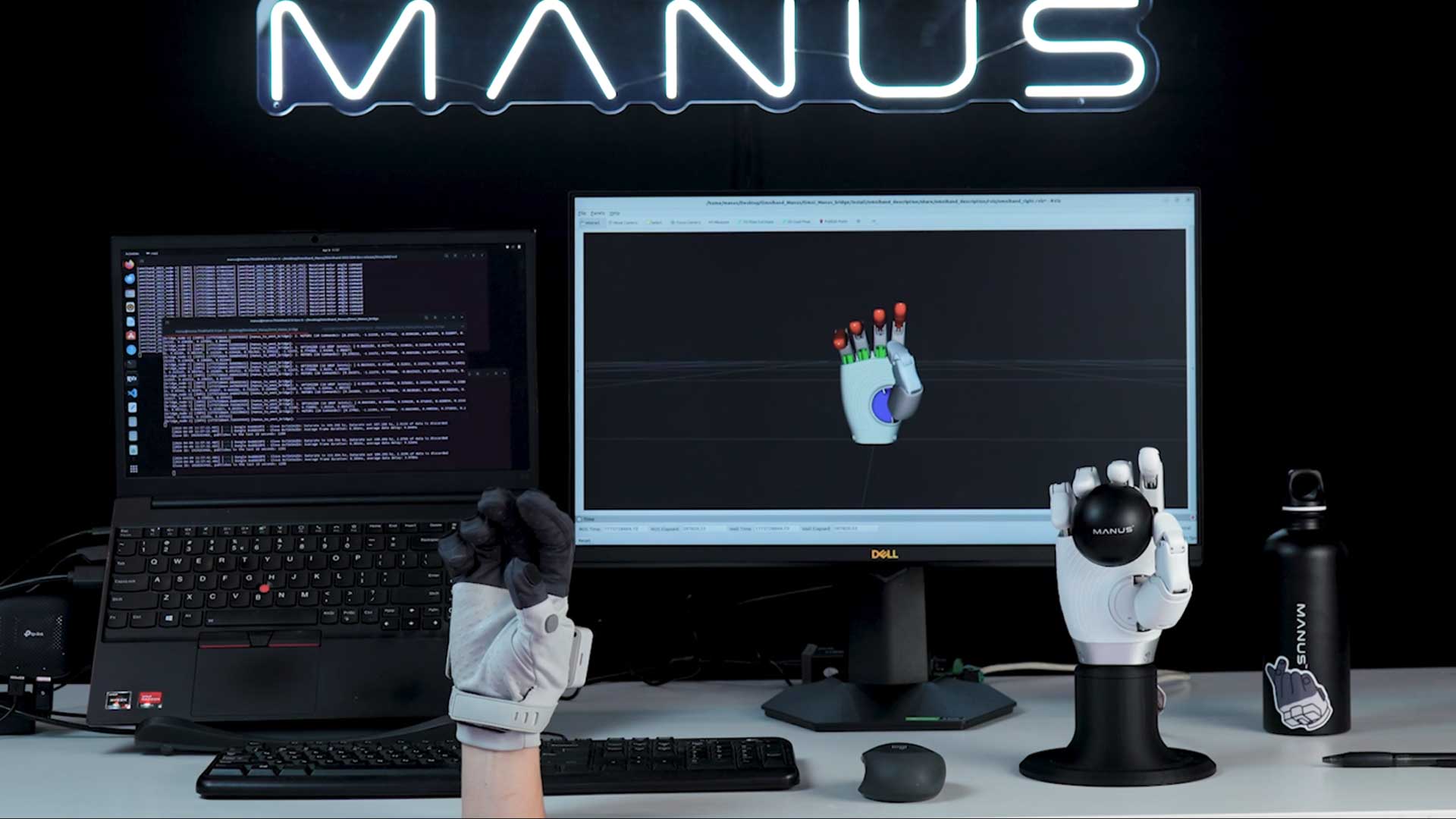
TESOLLO demonstrated the DG-5F series five-fingered robotic hand using MANUS Metagloves Pro Haptic during a teleoperation and haptic interaction setup. The demonstration included hand tracking, finger motion transfer, and tactile feedback components.
To drive the DG-5F series five-fingered robotic hand, TESOLLO used ergonomics data from MANUS Metagloves Pro Haptic. This data format represents finger flexion and spread in a way that can be translated to robotic joint control, allowing human hand movements to be mapped to the robotic hand through the selected control framework. For teleoperation, dexterous manipulation, and robot learning applications, the ergonomics data provides a structured representation of hand articulation that can be integrated into data collection and control workflows.
TESOLLO also demonstrated haptic feedback using the Metagloves Pro Haptic. Tactile sensing data from sensors was streamed through NVIDIA Isaac Sim and relayed to the operator via the gloves' haptic actuators. This allowed operators to receive tactile cues while interacting with objects in the simulated environment.
By providing both control input and tactile feedback, the setup enabled bidirectional interaction between the operator and the robotic system. The demonstration showed how the same haptic interface can be used across both simulated and physical environments, supporting teleoperation workflows that incorporate touch feedback alongside hand motion control.
For teams working on robot learning, dexterous manipulation, and embodied AI, the combination of accurate hand tracking and tactile feedback provides a versatile interface for teleoperation and interaction. TESOLLO's demonstration showed MANUS Metagloves Pro Haptic being used for both real-robot teleoperation and simulation-based interaction, highlighting its applicability across different development environments.