Dexterous robotic hands have made significant progress in 2026, with advances in dexterity, tactile sensing, and real-world stability across a range of hardware platforms. As hardware matures, the field is turning its attention to a harder challenge, generating the large-scale, high-quality data needed to train dexterous manipulation systems.
Robot hand companies at ICRA are working to solve a common challenge, generating accurate human demonstration data at scale. Contact-rich manipulation, precision grasping, bimanual coordination, and humanoid training all depend on input data that faithfully represents how a human hand moves. Imprecise motion capture propagates through the learning pipeline and results in lower-quality policies, regardless of the learning architecture.
Across many of these demonstrations, companies used MANUS gloves as the hand motion capture interface. MANUS provides hand motion data at three abstraction levels, including fingertip sensor positions, a calibrated 25-nodeskeletal model, and joint angle data, enabling motion retargeting across robotic hands with different morphologies.
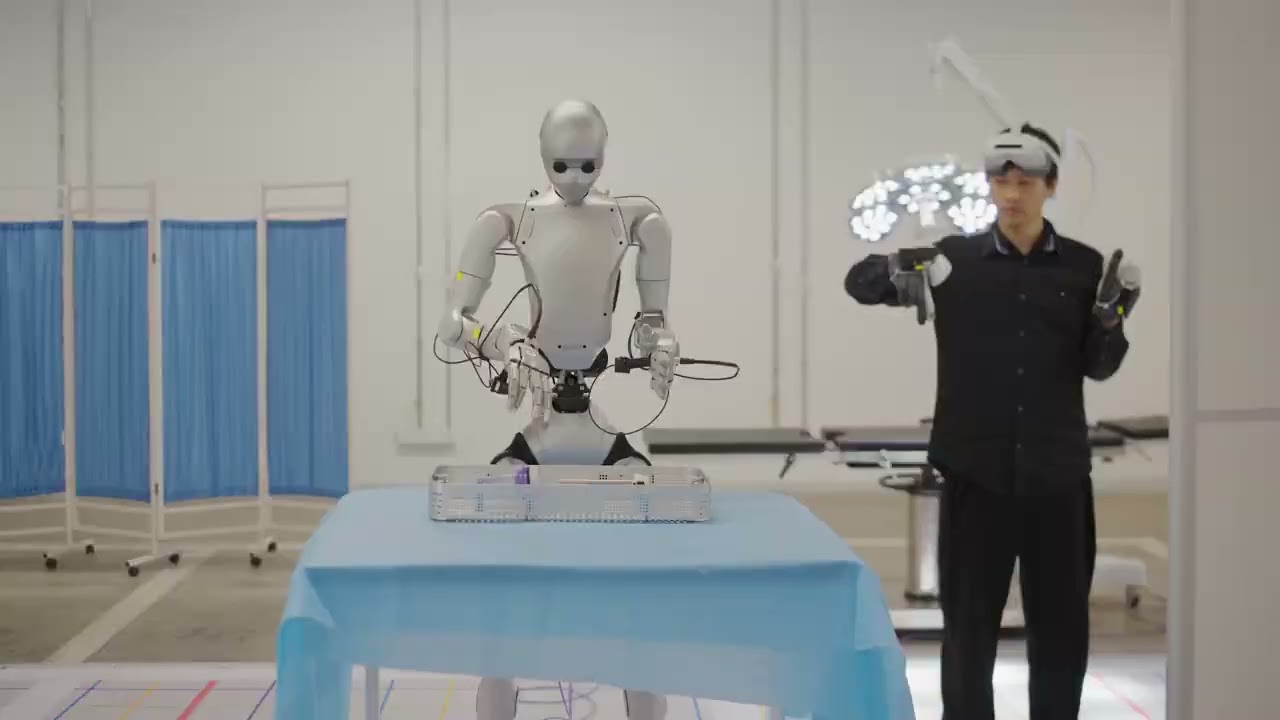
Several companies at ICRA showcased manipulation systems where tactile sensing played a central role. ROBOTERA, Brainco, TESOLLO, Xynova, and Shadow Robot demonstrated tactile-enabled robotic hands designed for contact-rich tasks that require continuous adjustment of grip, force, and physical interaction.





To support these teleoperation workflows, the companies integrated MANUS Metagloves Pro Haptic to establish a closed-loop interaction between the operator and the robot. The resulting demonstration data captures both finger motion and haptic interaction signals, providing richer training data for contact-rich manipulation.
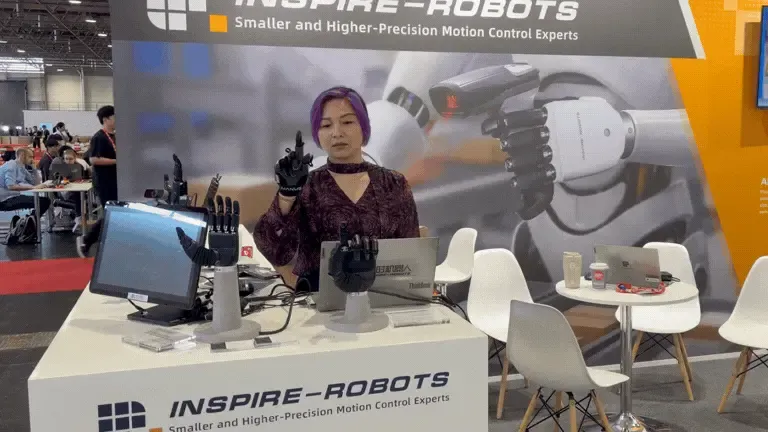
Beyond tactile sensing, several companies focused on another fundamental challenge, mapping human hand motion to robotic hands with high accuracy and low latency. AgiLink, Inspire, and Allegro all used MANUS gloves to bridge this gap.
Using MANUS gloves, these companies captured human hand motion with the precision and repeatability required for robot learning. MANUS gloves’ skeletal retargeting layer enabled accurate transfer of demonstrations across robotic hands with different morphologies.

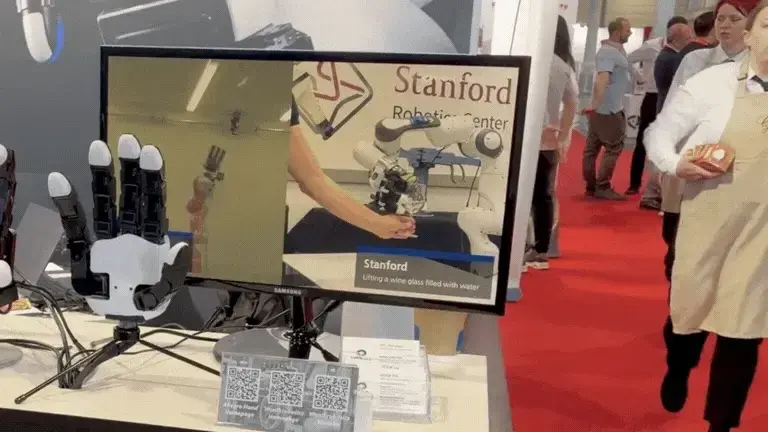
Dexterous manipulation data extends beyond the fingers. NOKOV combined optical rigid-marker tracking with MANUS gloves to capture both wrist and hand motion, producing datasets that include full upper-limb kinematics alongside detailed finger data. Alt Bionics integrated Meta Quest 3 with MANUS gloves for dual-arm teleoperation, capturing the operator's position and orientation together with detailed hand motion.


ICRA 2026 highlighted a common direction across dexterous robotics. As robotic hardware matures, the focus is shifting toward scaling high-quality human demonstration data. Across the demonstrations, tactile feedback, precise motion retargeting, and spatial tracking emerged as complementary technologies for building richer datasets for robot learning. MANUS served as the underlying hand motion capture platform across many of these workflows, enabling the capture of data that faithfully represents how a human hand moves.