
UC San Diego, Amazon FAR, and UC Berkeley Develop Cross-Embodiment Dexterous Manipulation Framework

Scalable Bimanual Robot Learning via High-Fidelity Human Demonstrations Using MANUS Gloves
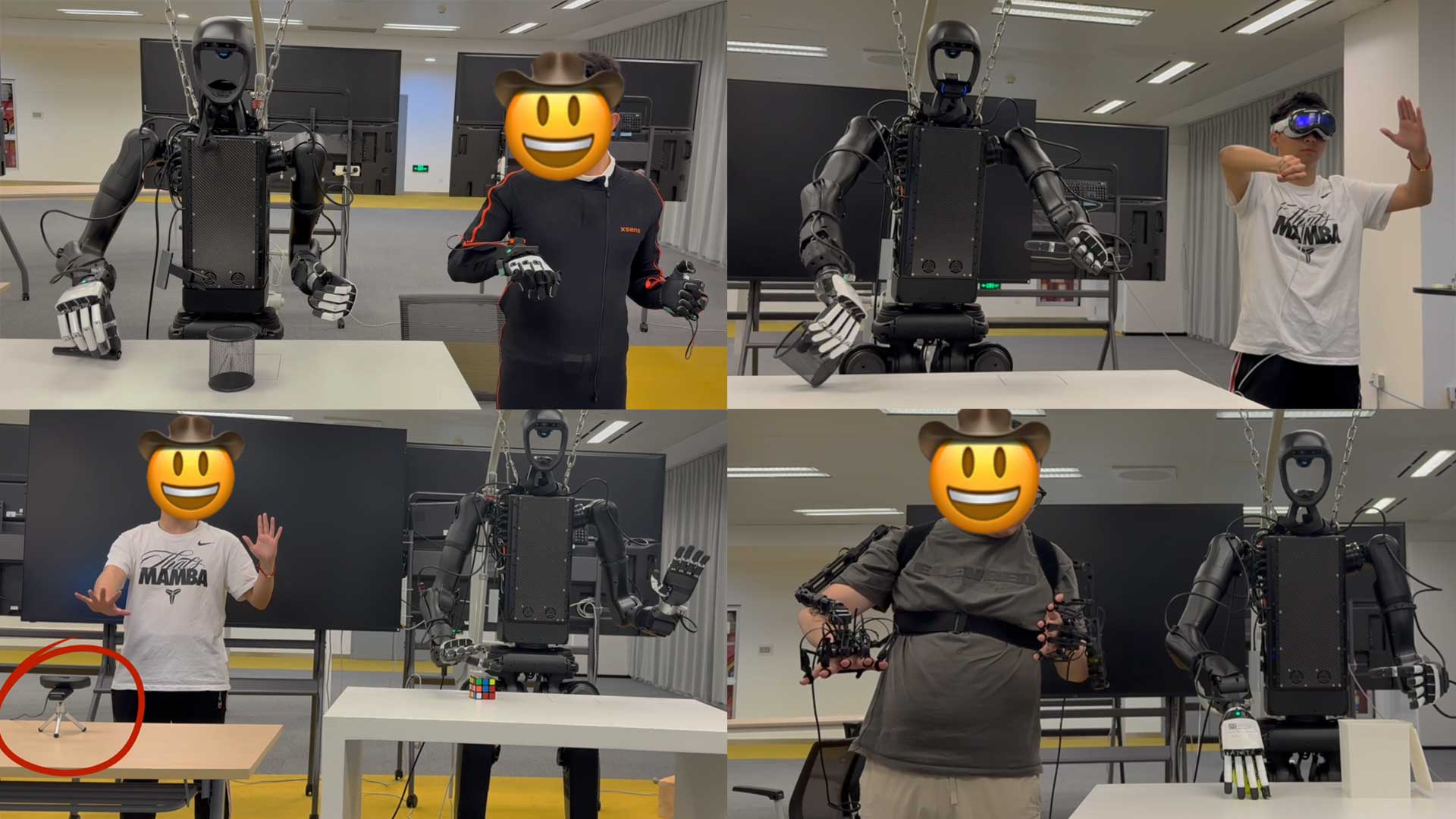
Comparing Teleoperation Systems for Embodied Robot Learning with TeleOpBench

Dexterous Teleoperation with MANUS and the Psyonic Ability Hand in MIT CSAIL's Actuated Neck Study


