Founded in 2025 in Silicon Valley, Chestnut Robotics (formerly known as TetherIA) is focused on one of the most complex challenges in robotics: enabling human-like manipulation. Their work spans both hardware and AI-driven control, with the goal of making dexterous robotics more accessible and scalable.
With Aero Hand Open, Chestnut Robotics introduces a lightweight, open-source robotic hand designed to bring high-dexterity manipulation into the hands of more researchers and developers.
Many high-performance robotic hands are expensive and difficult to access, limiting experimentation and slowing progress in manipulation research. Chestnut Robotics’ approach with Aero Hand Open is different. By combining a tendon-driven architecture with a lightweight design under 400 grams, they offer a system that balances cost, performance, and accessibility.
With 16 joints driven by 7 motors, the hand recreates natural movement patterns while remaining compact and fully back drivable for safe interaction.
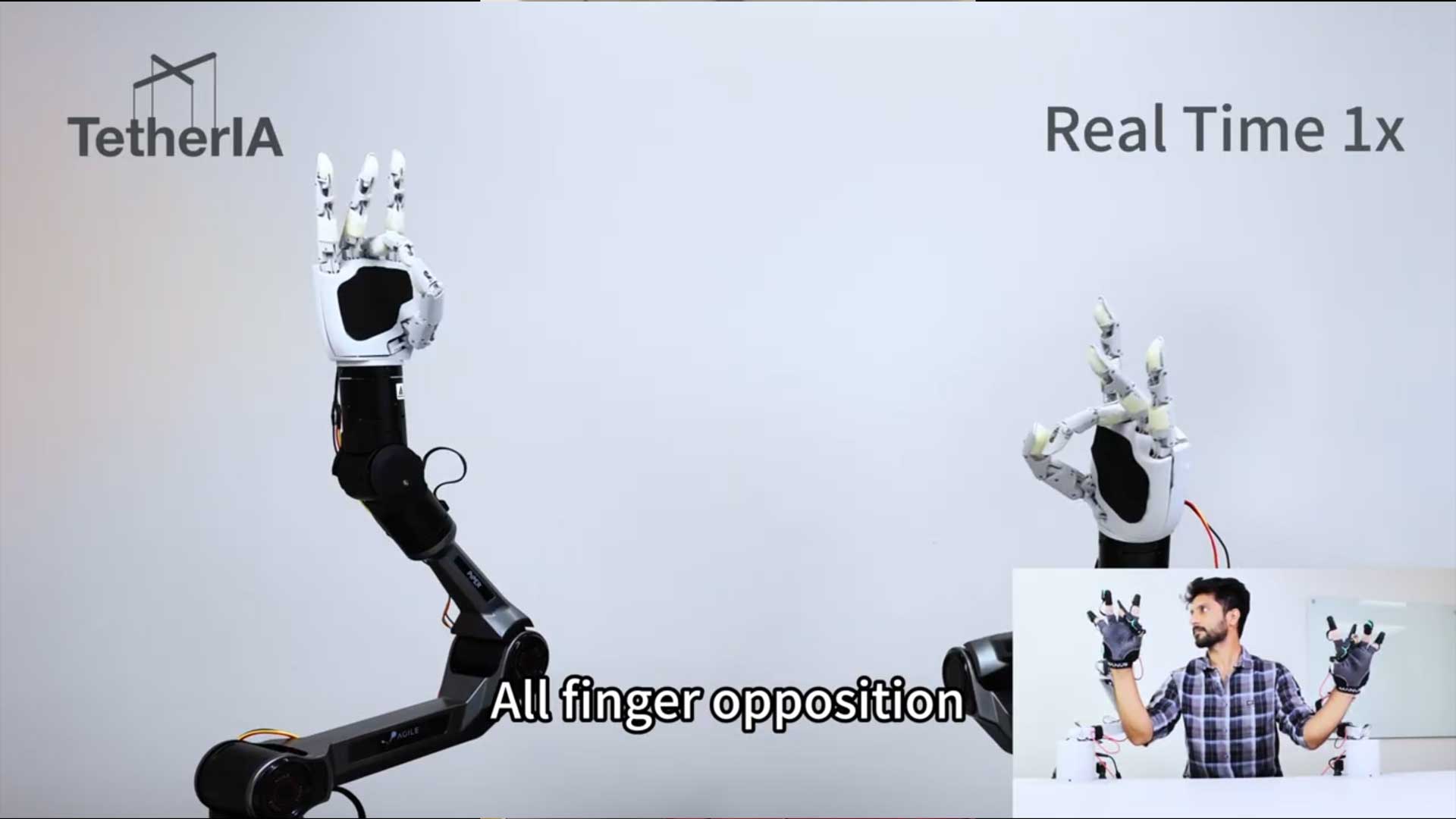
In this video, two Aero Hand Open systems are controlled simultaneously using MANUS gloves.
MANUS gloves capture detailed hand articulation in real time, allowing an operator to control both robotic hands with natural motion. Each finger movement is translated into coordinated joint behavior through the hand’s tendon-driven system.
This setup enables intuitive bimanual control, where both hands can interact with objects in a way that closely reflects human movement.
The system is shown performing a wide range of everyday manipulation tasks, including:
These examples highlight the versatility of the platform, from precision tasks to larger object handling, all driven through direct human input.
Aero Hand Open supports multiple control modes, including position and torque control, along with inline tendon force sensing. This allows developers to explore different approaches to manipulation while working with a system that reflects real-world interaction dynamics.
By making the design open-source, Chestnut Robotics aims to lower the barrier to entry for dexterous manipulation research and encourage broader experimentation. MANUS gloves provide precise hand tracking, while the robotic system translates that input into coordinated, physical interaction. This pairing supports both teleoperation and the collection of high-quality demonstration data for future learning systems.