How RLWRLD Collects Human Dexterity Data for Physical AI Training
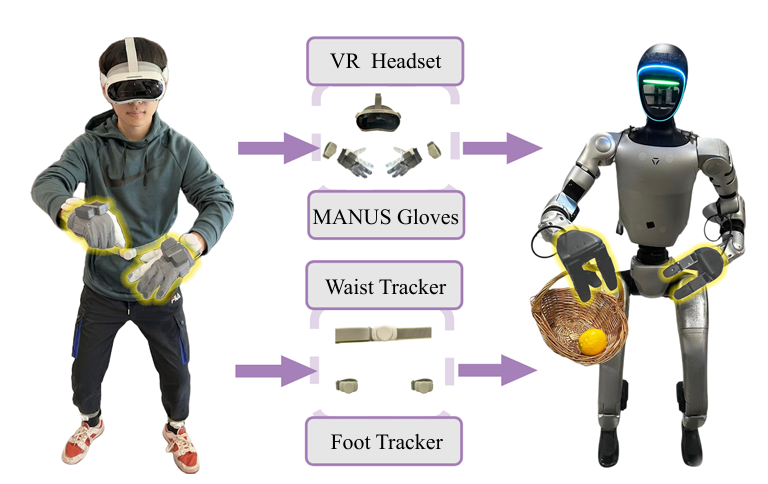
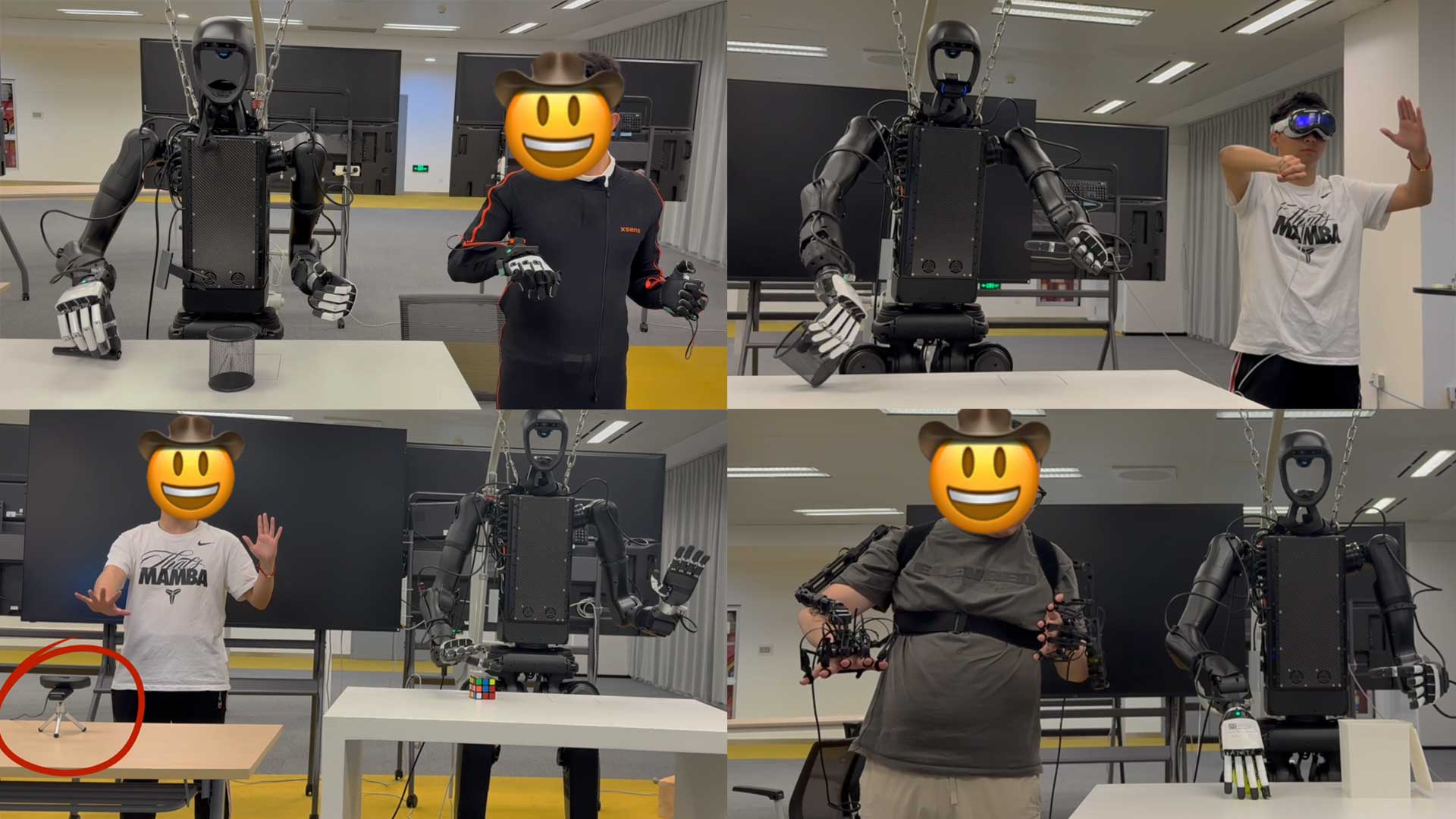
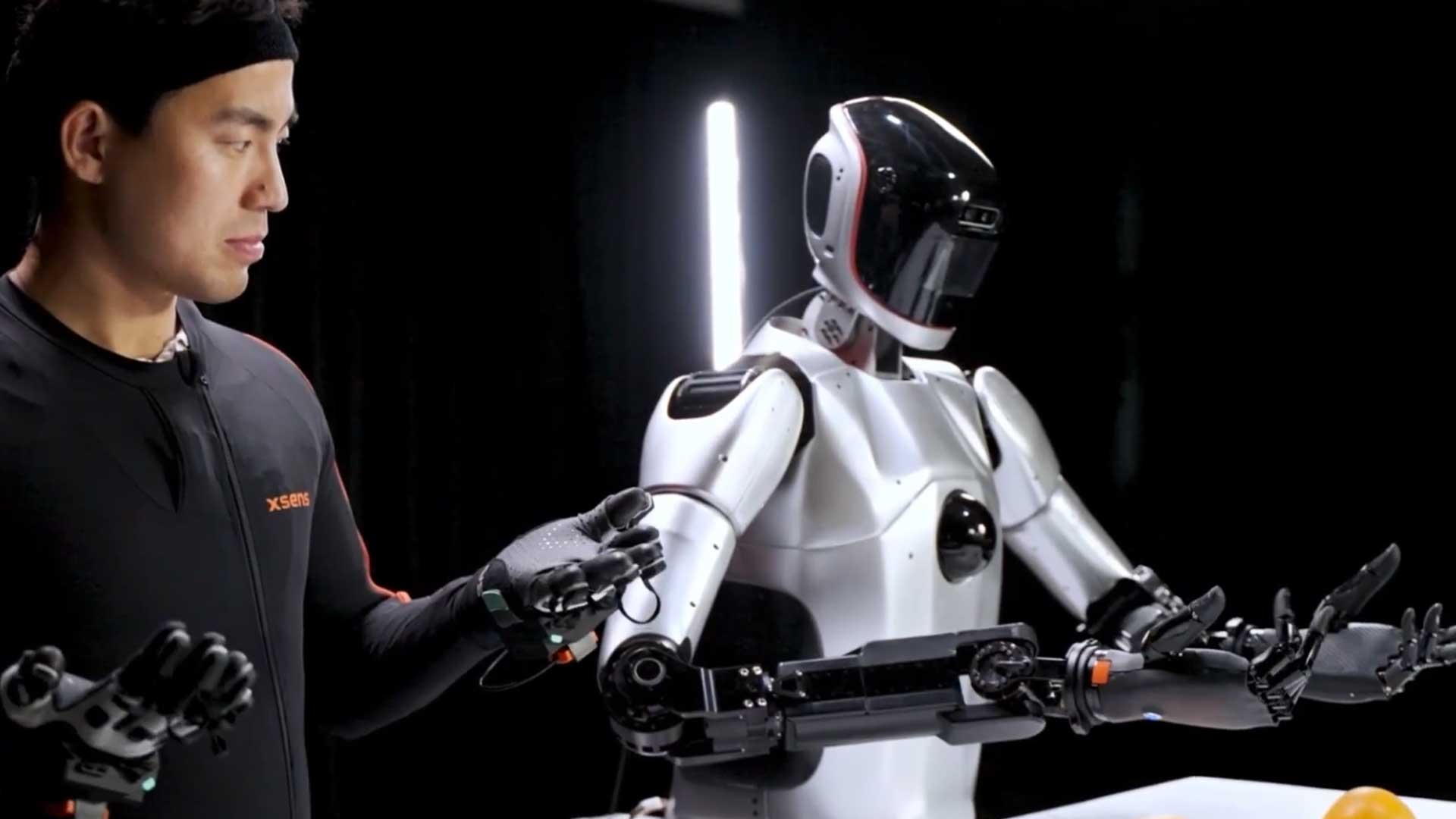
How MANUS Gloves Enable Dexterous Teleoperation for USC PSI Lab's Humanoid Foundation Model
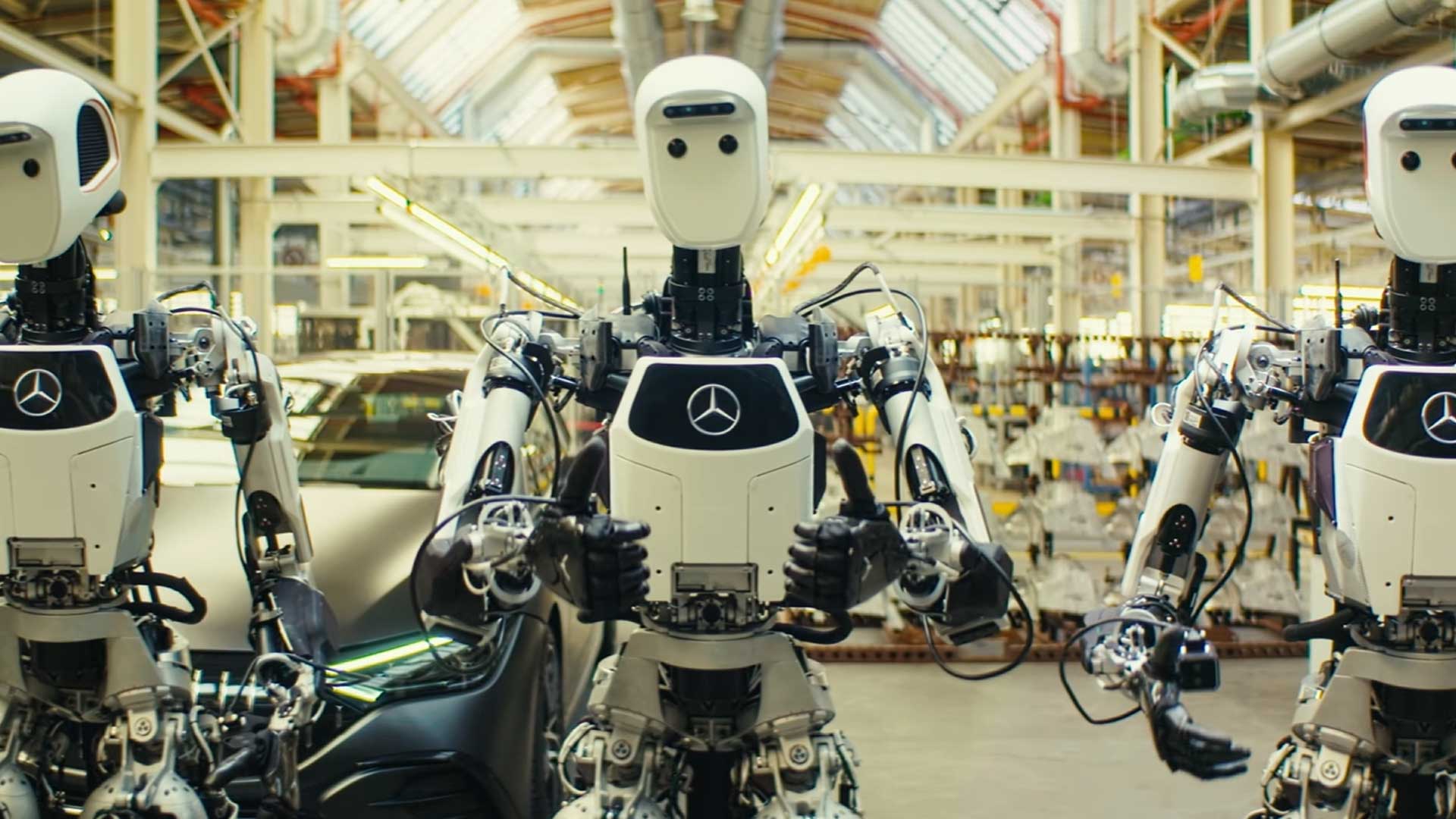
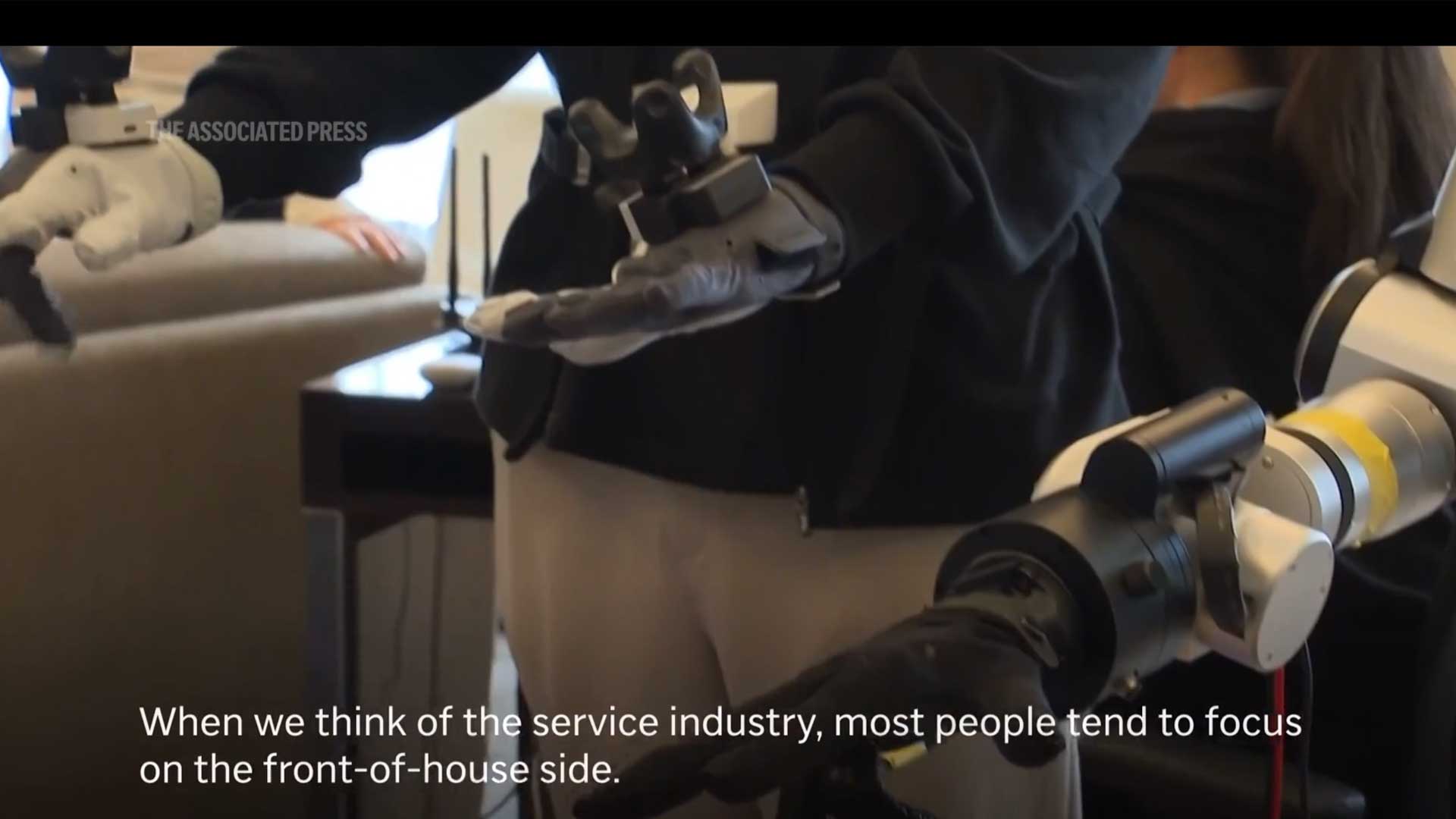
Mercedes-Benz Deploys Apptronik's Apollo at Factory Floor Using MANUS Gloves
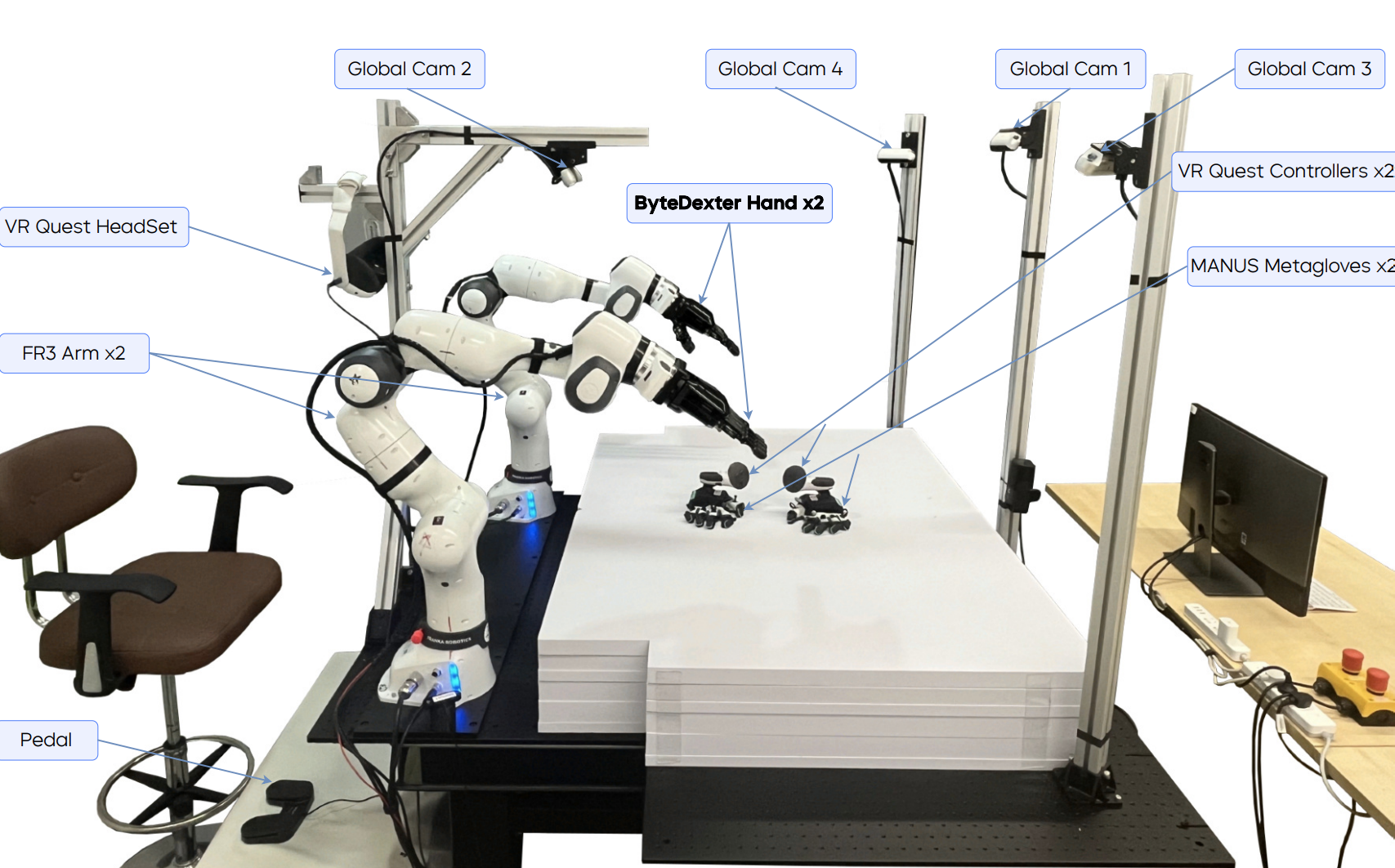
ByteDance Seed Advances Bimanual Dexterous Manipulation with MANUS Gloves

Breaking the Sim-to-Real Gap in Robot Hand Training with MANUS Gloves

How to Teleoperate PSYONIC Ability Hand with MANUS

UC San Diego, Amazon FAR, and UC Berkeley Develop Cross-Embodiment Dexterous Manipulation Framework

Teleoperating a 22-DoF Sharpa Hand Inside NVIDIA Isaac Lab using MANUS Gloves

TUM RoboGym: Europe's Largest Physical AI Training Center Capturing Real-World Manipulation Data at Scale

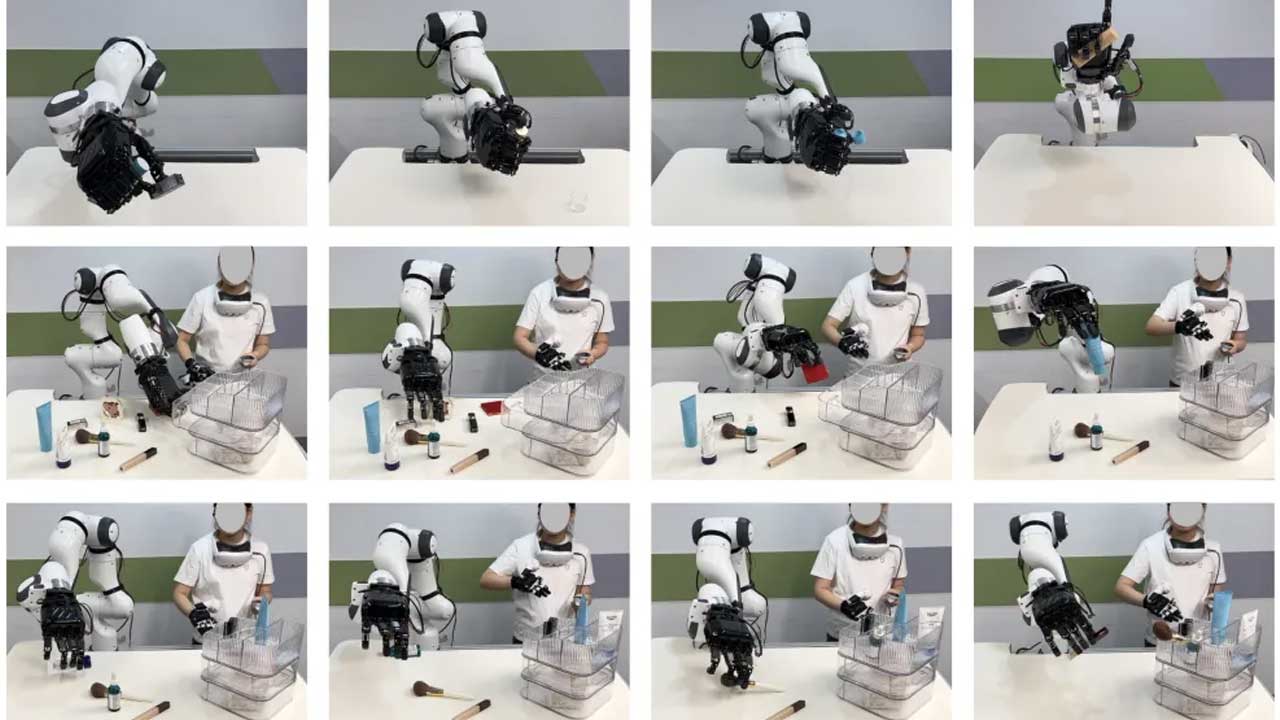
Scalable Bimanual Robot Learning via High-Fidelity Human Demonstrations Using MANUS Gloves
Comparing Teleoperation Systems for Embodied Robot Learning with TeleOpBench

Dexterous Teleoperation with MANUS and the Psyonic Ability Hand in MIT CSAIL's Actuated Neck Study
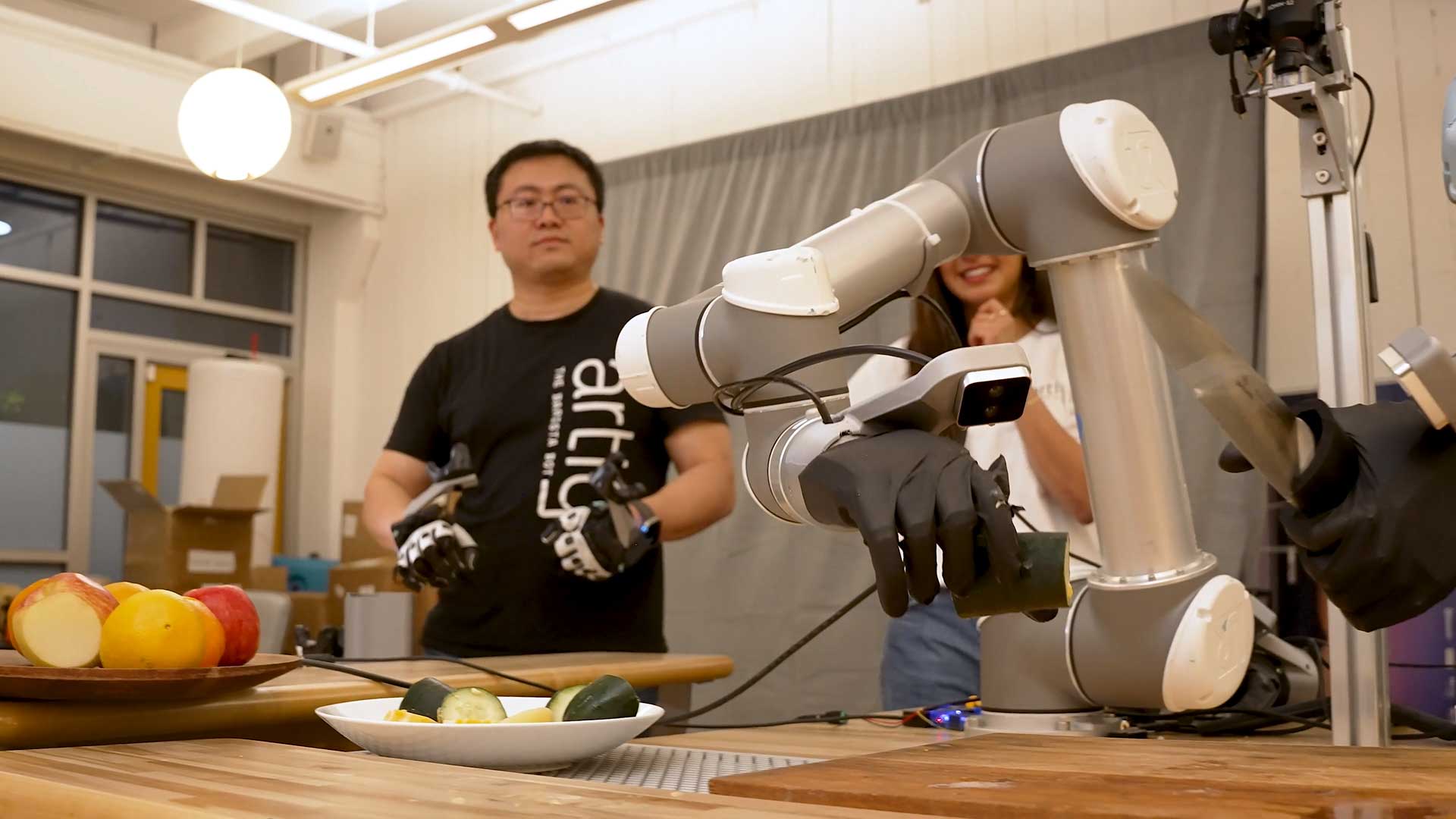
Artly AI’s Approach to Scalable Embodied AI for Real-World Tasks

Raptor House FX, Alt-Bionics, and MANUS Bring Netflix’s Wednesday Character “Thing” to Life

Adam Savage Tests the “Thing” from Netflix’s Wednesday — Powered by MANUS Gloves

TESOLLO: Maximize Robot Dexterity with MANUS & Franka Robot Arm

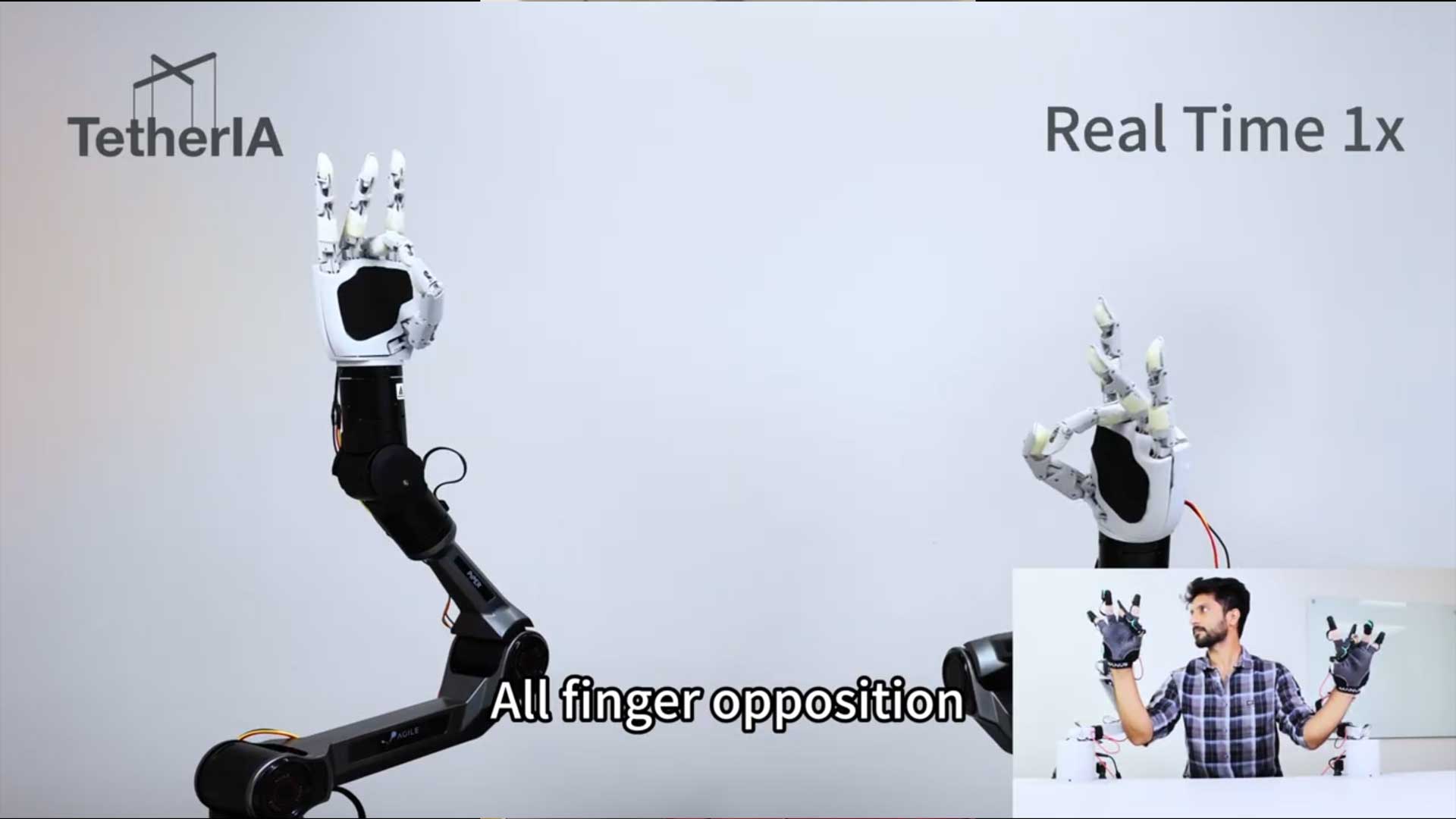
Teleoperating High-Dexterity Robotics with MANUS Gloves
Open-Source Dexterous Manipulation with MANUS Gloves

DeepCybo Uses MANUS Gloves for High-Fidelity Dexterous Manipulation Data Collection
Dexterous Teleoperation with MANUS: High-Fidelity Control of the 20-DoF ByteDexter Hand

Bridging Simulation and Reality for Robot Skill Learning with MANUS
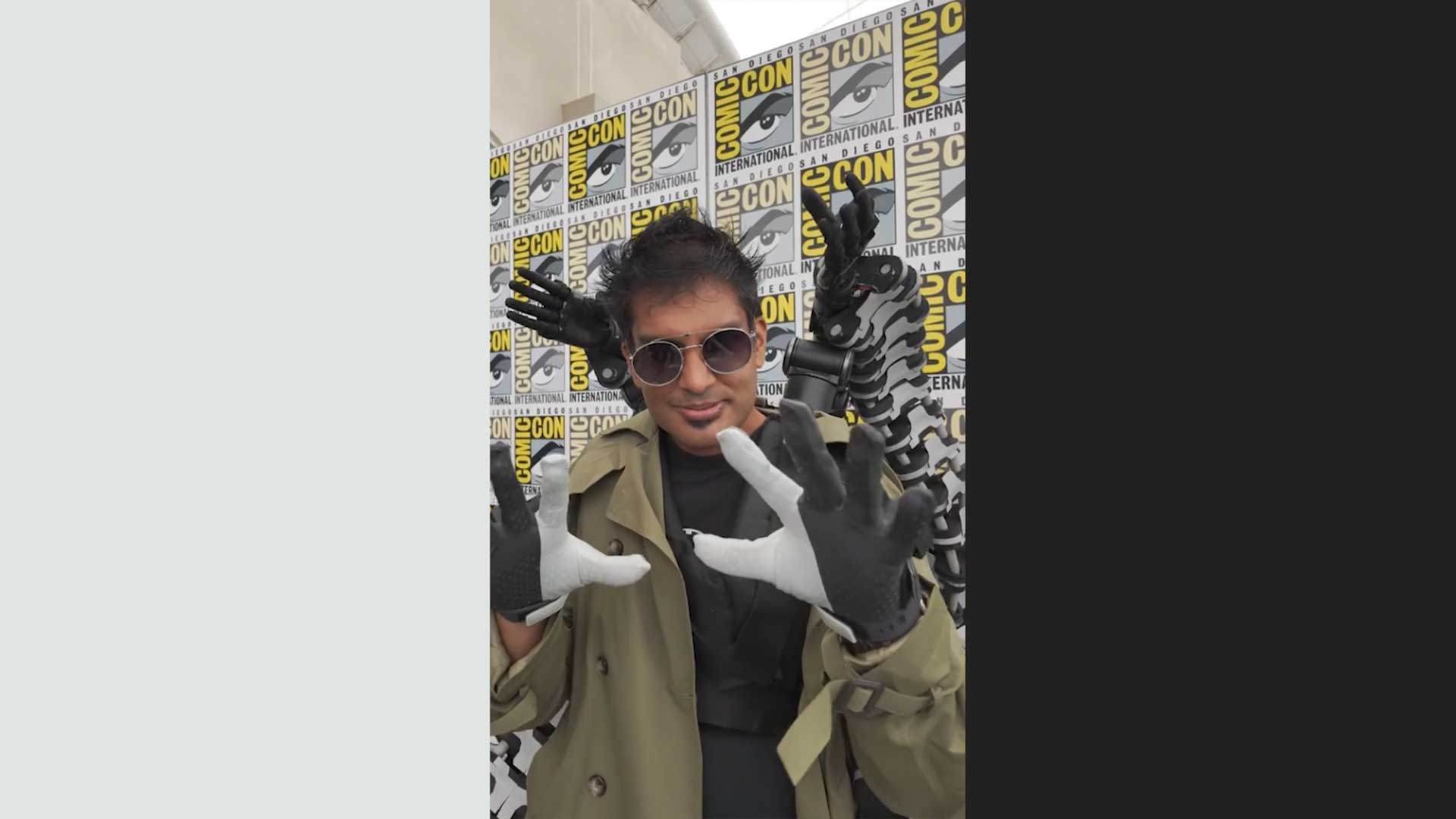
How PSYONIC and MANUS Brought the Doc Ock Suit to Life at Comic-Con

Alt-Bionics Surge Hand: Extending Prosthetic Expertise into Robotics with MANUS

ROBOTERA: Advancing Dexterous Robotics with MANUS Gloves
China’s Baihu Data Hub: Powering Dexterous Robots with MANUS gloves


