Deploying humanoid robots in unstructured, real-world manufacturing environments is one of the hardest unsolved problems in robotics. An effective path to that capability is teleoperation-driven imitation learning: capturing high-fidelity human motion data and using it to train robot policies that generalize across tasks and conditions.
To meet this challenge, Apptronik, developer of the Apollo humanoid robot, chose MANUS gloves to collect the precise hand and finger motion data needed to accelerate robot learning at Mercedes-Benz production facilities in Berlin, Germany.
MANUS data gloves use electromagnetic field-based sensing to track the full kinematic data of the hand. Unlike optical or IMU-based systems, this approach is immune to occlusion and performs consistently in complex environments.
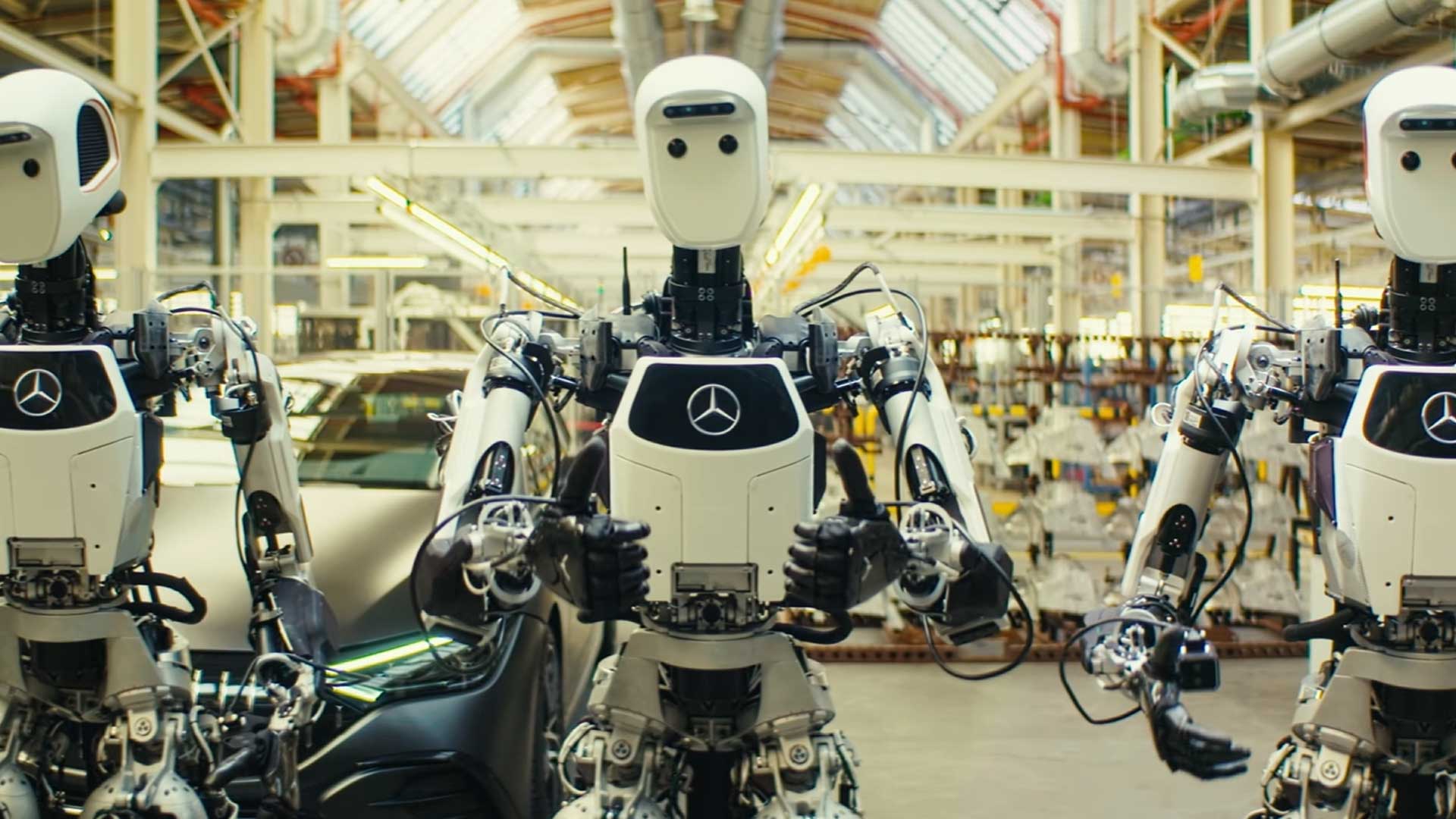
In the Mercedes-Benz deployment, human operators wearing MANUS gloves directly teleoperating Apollo demonstrated target movements while the system logged synchronized data in real time. This teleoperation stream allowed Apollo to execute tasks immediately under human guidance while simultaneously generating the training dataset required for policy learning. As seen in footage from the facility, Apollo is shown operating alongside workers at the Mercedes-Benz facility with the PSYONIC Ability Hand integrated on its arm, controlled by MANUS data gloves.
As policy performance improves with accumulated data, Apollo progressively transitions from full teleoperation to human-supervised autonomy and, ultimately, to independent execution. The quality of this progression is directly dependent on the fidelity of the input data, making the accuracy and consistency of MANUS glove measurements acritical factor in the system's overall learning efficiency.