This use case is based on findings from the technical report " OSMO: Open-Source Tactile Glove for Human-to-Robot Skill Transfer" (December 2025). The research results, methodologies, and performance metrics described are those reported by the paper's authors. For complete technical details, please refer to the original publication here.
Developed by Meta FAIR, the OSMO (Open Source tactile glove for huMan-to-robOt) glove represents a breakthrough in human-to-robot skill transfer by capturing rich tactile feedback during human demonstration.
Most robot learning from demonstration pipelines rely heavily on vision based hand tracking. These approaches break down during real world manipulation when fingertips are occluded by objects, tools, or surfaces. At the same time, vision cannot infer contact forces such as pressure, shear, or grip stability. As a result, policies trained without tactile information often fail due to inconsistent pressure application, slipping, or loss of contact during execution.
The OSMO tactile glove integrates twelve three axis magnetic tactile sensors across the fingertips and palm to capture both normal and shear forces. To prevent hand tracking degradation during contact, where visual occlusion frequently occurs, MANUS Quantum Metagloves were selected for integration with the OSMO system.

MANUS Quantum Metagloves provide direct finger joint sensing that does not rely on camera visibility, deliver clean joint level kinematics without restricting natural human dexterity, and operate at sensing frequencies that do not interfere with OSMO’s magnetic tactile sensors. This combination ensures continuous and accurate hand pose tracking under occlusion, enables reliable alignment between hand motion and tactile forces, and makes tactile driven human to robot skill transfer practical and robust.
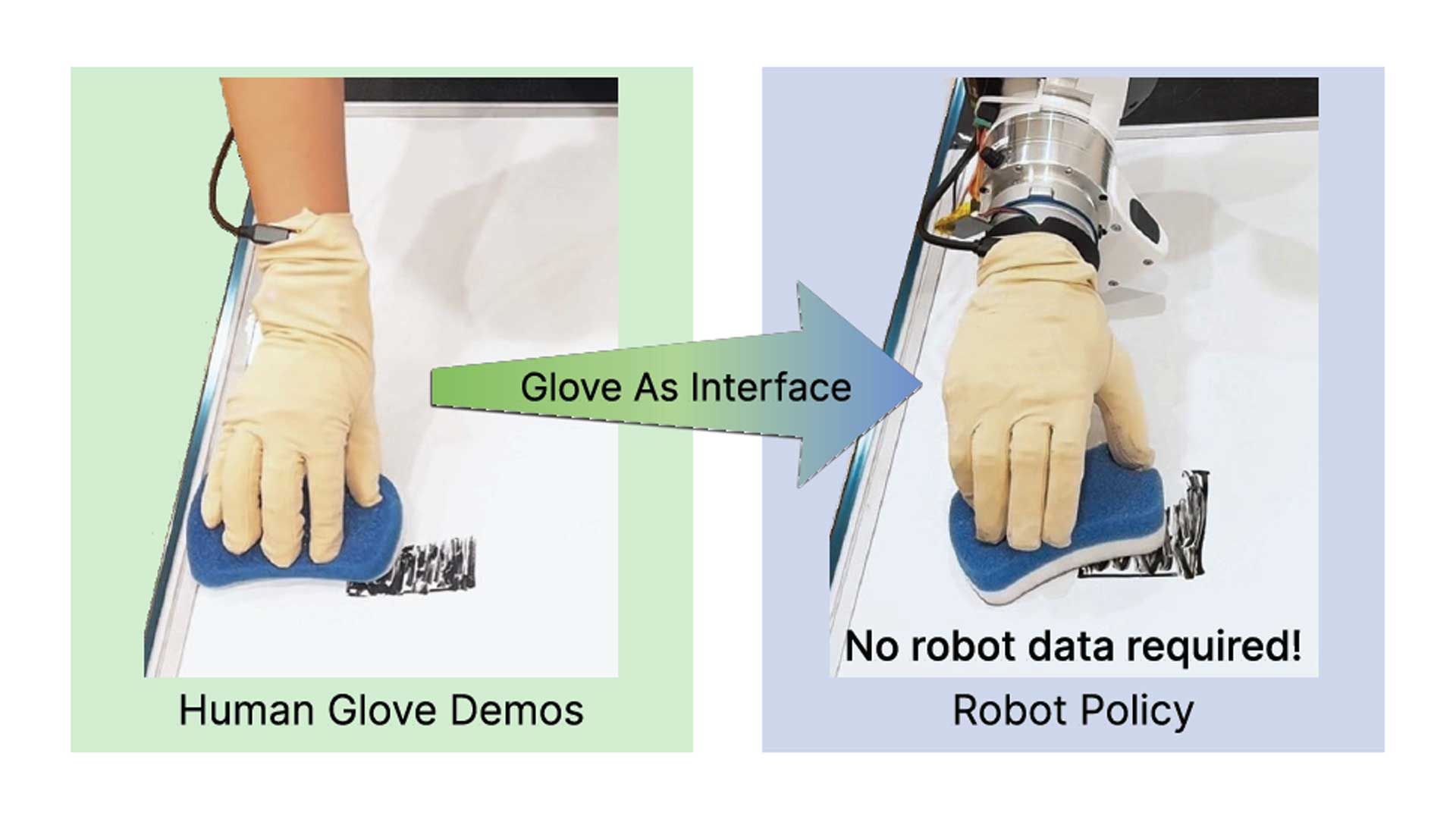
The MANUS and OSMO system was evaluated on a contact rich wiping task using a Franka robot arm with a dexterous robotic hand. Robot policies were trained exclusively on human demonstrations captured with MANUS gloves and OSMO tactile feedback, without using any robot interaction data.
Policies that leveraged MANUS hand tracking together with tactile sensing achieved a 72 percent success rate, compared to 56 percent for vision and proprioception only baselines. Tactile aware policies consistently eliminated contact related failure modes such as insufficient pressure, uneven force application, and loss of grip. Remaining failures were primarily due to incomplete task coverage rather than contact execution, highlighting the importance of occlusion robust MANUS gloves for reliable tactile driven robot learning.
Note: This integration was implemented experimentally by Meta FAIR for research purposes. MANUS Metagloves Pro Haptic do not integrate OSMO tactile sensors as a standard product feature.