Products
Background
As robotics evolves beyond industrial automation into humanoid assistance and human-machine collaboration, the demand for dexterous robot hands has surged. Under-actuated hands struggle to replicate humanlike manipulation or provide reliable tactile feedback for AI training.
ROBOTERA launched XHAND1 as its first product-level dexterous robot hand. Comparable in size to a human hand and equipped with advanced sensors, XHAND1 was designed to replicate complex hand movements, operate real-world tools, and serve as a platform for next-generation research and deployment.
Challenges
Developing XHAND1, with its 12 fully actuated degrees of freedom (DoF), requires a motion capture solution that can match its speed, precision, and dexterity. Vision based tracking systems, while effective for basic gesture recognition, fall short when applied to advanced robotic manipulation.
- Speed and latency: Vision based systems often introduce noticeable delay, limiting responsiveness during fine manipulation and real-time teleoperation.
- Dexterity mapping: XHAND1’s 12 DoFs demand high-fidelity input, where each joint is captured and mapped independently.
- Occlusion and continuity: Visual tracking is prone to interruptions when fingers overlap or move out of view, resulting in inconsistent motion data. This undermines both control reliability and the quality of training datasets.
Solution
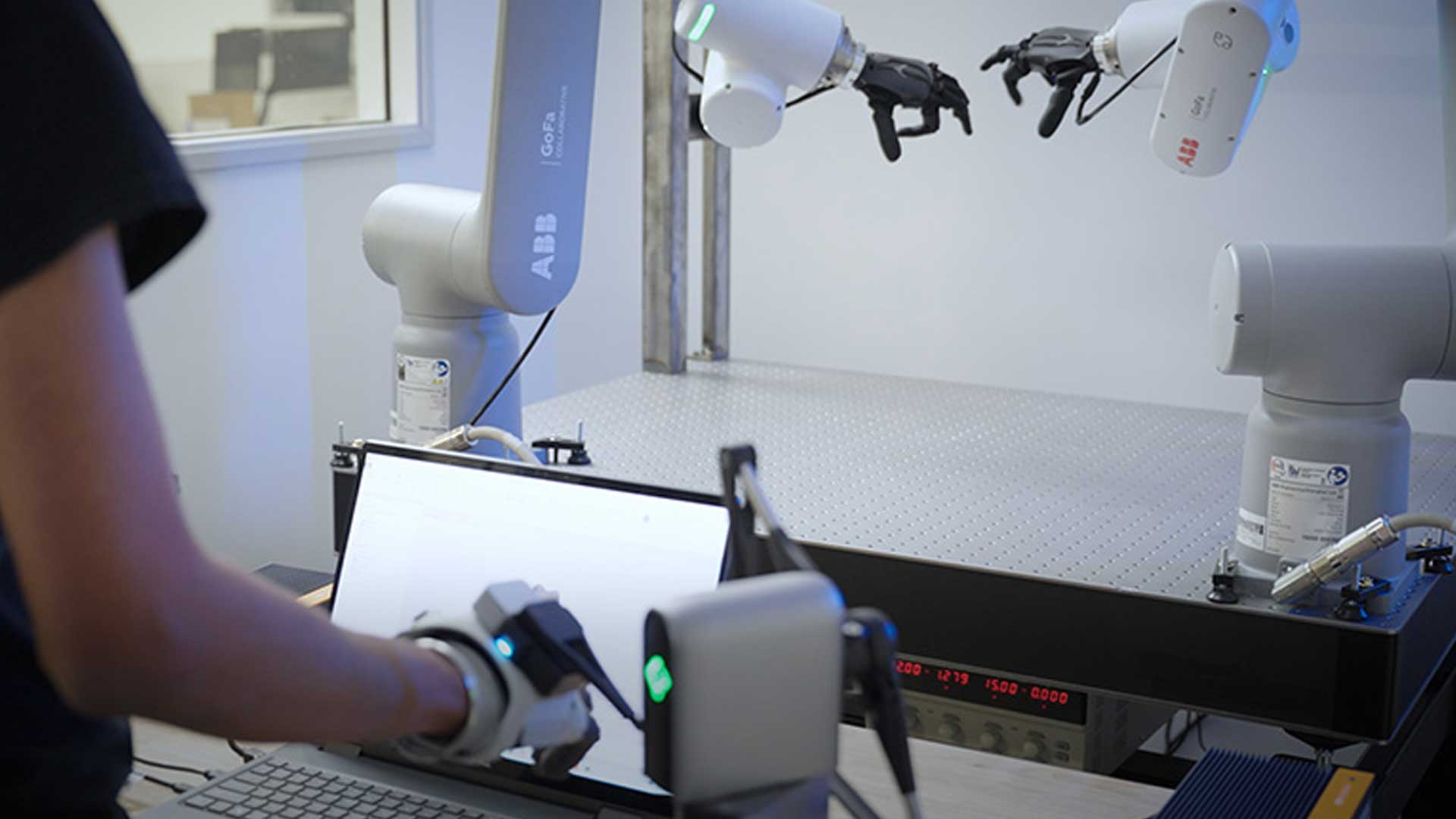
To overcome these challenges of speed, dexterity, and robust motion capture, ROBOTERA integrated MANUS finger tracking with the XHAND1 dexterous hand through ROS2. Several key components enable this workflow:
- MANUS ROS2 Package: A ROS2 wrapper for the MANUS C++ SDK, providing seamless integration of MANUS gloves into ROS2 projects. It publishes glove data as ROS2 topics using custom message types, including raw skeleton data, ergonomic values, and sensor data (Metagloves Pro).
- Retargeting Layer: The retargeting node translates MANUS glove input into XHAND1’s 12-DoF hand, ensuring intuitive operation and precise control for fine manipulation.
- XHandControlROS2: A ROS2 package for EtherCAT communication with XHAND, offering full joint control and sensor readout. It provides a full control interface via ROS2 topics, services, and callbacks.
Looking Ahead
Beyond current integration, MANUS and ROBOTERA are testing a Pressure-to-Haptic Bridge that connects XHAND1’s tactile arrays with next-generation haptic gloves. Once fully realized, this will:
- Deliver real-time tactile feedback to operators, enabling them to feel force, texture, and temperature sensed by the robot hand.
- Enhance telepresence precision in remote manipulation and human-robot collaboration.
- Provide immersive training datasets by pairing motion capture with tactile sensing, accelerating embodied AI research.
Together, these advancements lay the foundation for truly immersive dexterous robotics, where control and touch merge into one seamless human-robot interface.