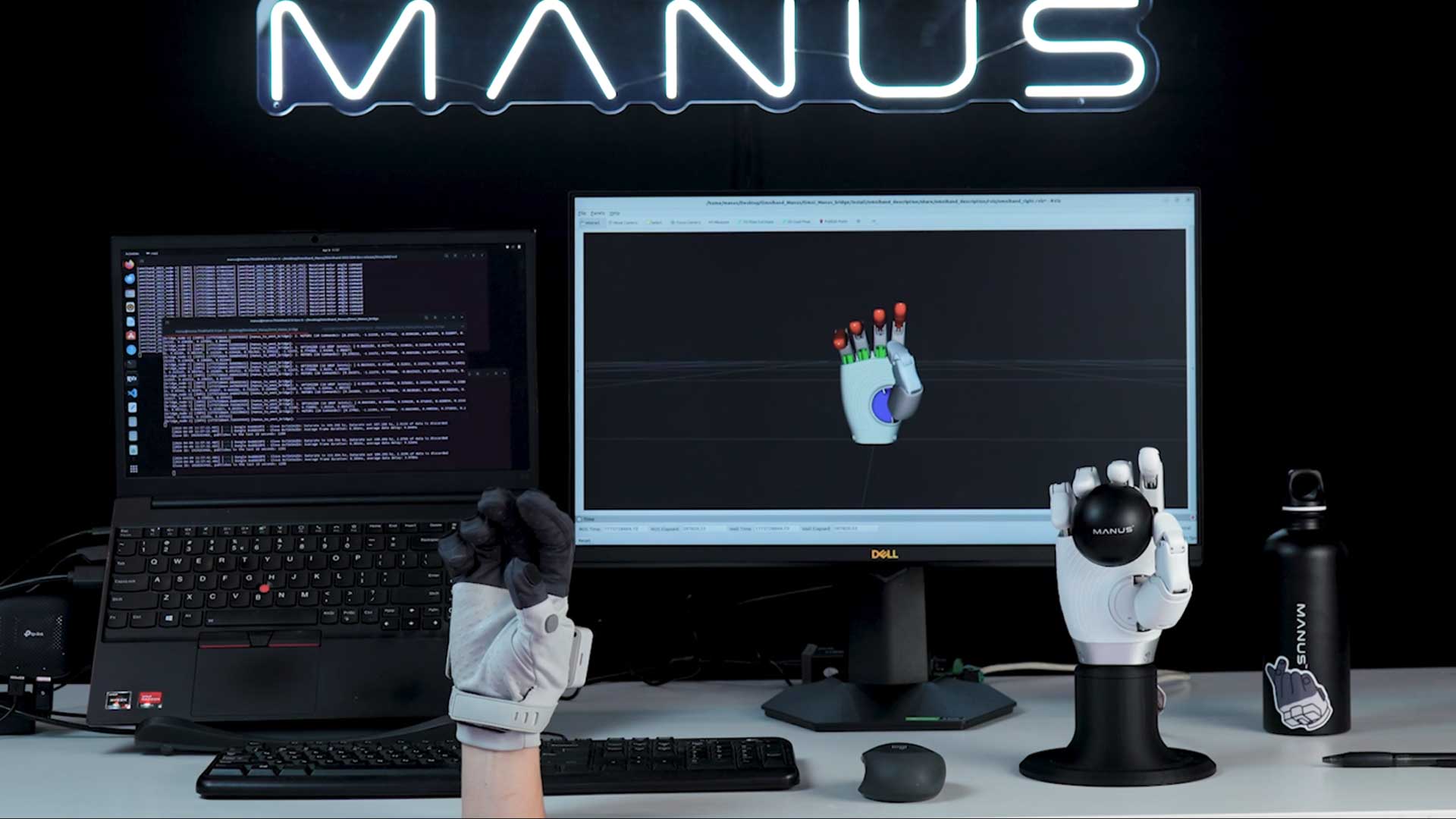
Collecting high-quality dexterous manipulation data in simulation demands an input device that can faithfully capture the full range of human hand motion. MANUS gloves, now natively integrated into NVIDIA Isaac Lab 2.3, address this requirement directly. In this demonstration, operators use MANUS gloves to teleoperate the Sharpa Wave, a 22-DOF dexterous robotic hand inside NVIDIA Isaac Lab, translating natural hand motion into real-time robot joint control with millimeter-level fidelity.
Simulation-first robot policy training offers advantages such as lower cost, faster iteration, and safer deployment pipelines. However, the quality of trained policies is bounded by the quality of demonstration data. For dexterous manipulation tasks requiring highly coordinated multi-finger control, most teleoperation input devices fall short. Vision-based hand tracking introduces occlusion errors and latency, while low-DoF controllers cannot capture the nuanced finger kinematics that complex manipulation tasks require.
MANUS gloves are built to capture the full range of hand motion with millimeter-level precision, remaining stable across extended operation sessions without drift. Natively supported in NVIDIA Isaac Lab 2.3, they stream high-fidelity hand tracking data directly into simulation, eliminating the setup friction that typically slows down data collection pipelines.
In this use case, operators wearing MANUS gloves teleoperate the 1:1 anthropomorphic 22-DoF Sharpa Wave inside Isaac Lab in real time. Hand configurations map directly to robot joint positions, creating an egocentric teleoperation interface that captures the full range of finger kinematics as naturally as possible.
The recorded demonstrations feed directly into Isaac Lab Mimic for augmentation and scaling, then into imitation learning pipelines, all within simulation, before any real-world deployment.
MANUS data gloves capture every finger and micro-movement in real time, delivering the precise, stable, occlusion-free hand tracking that dexterous manipulation research requires, natively integrated into the NVIDIA Isaac Lab workflow. Learn more about the integration.